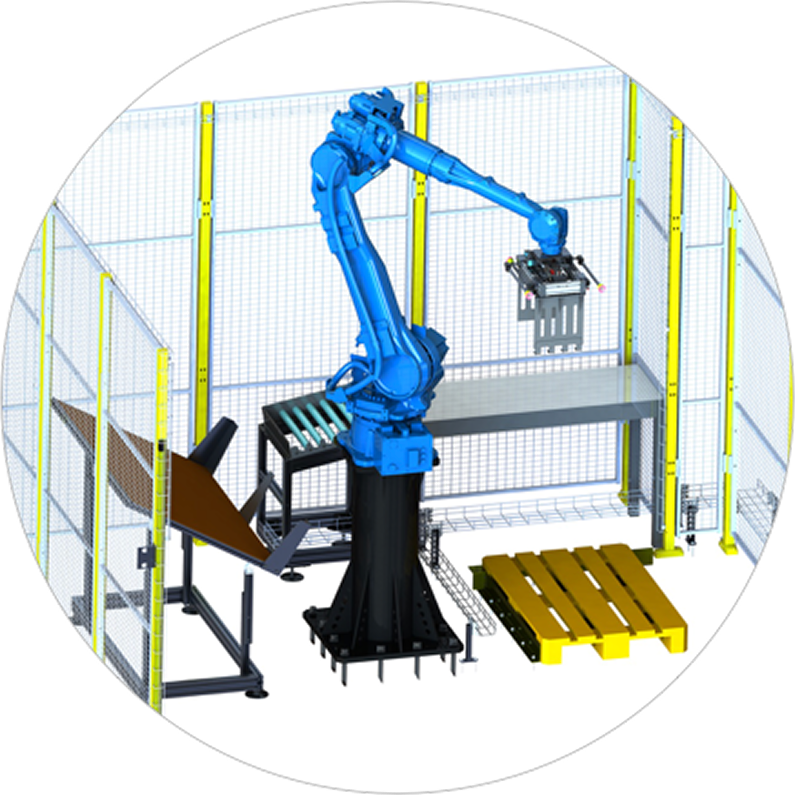
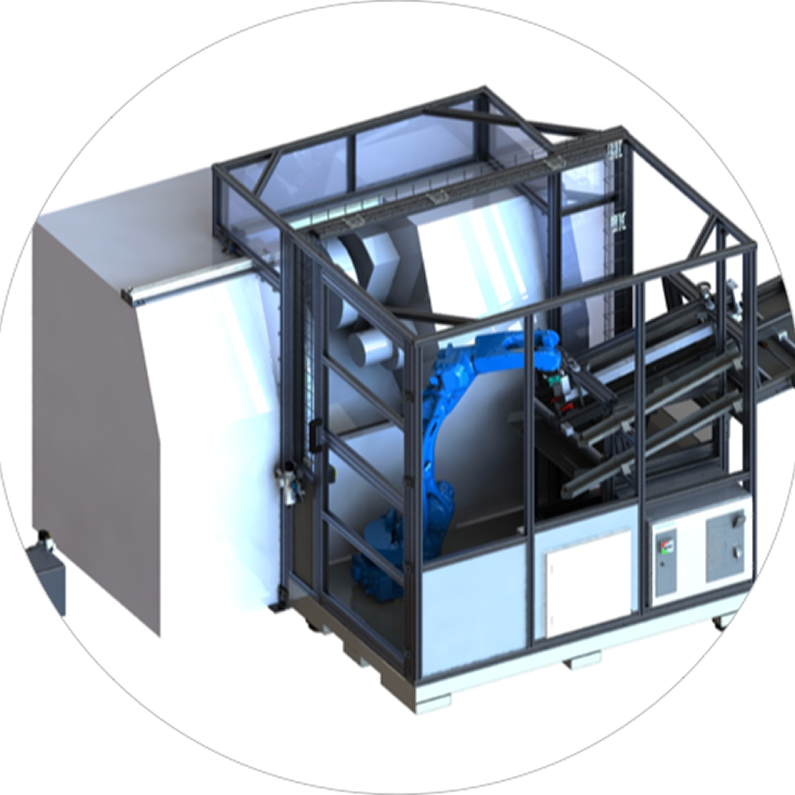
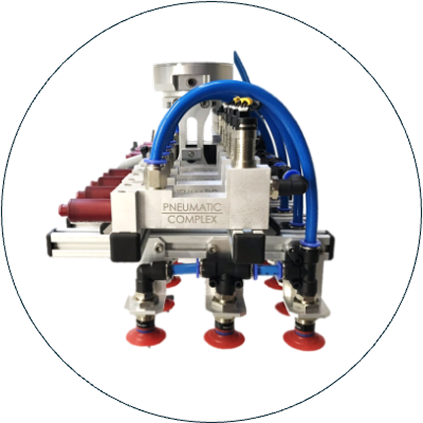
Proces paletyzacji produktów wraz z umieszczeniem przekładek pomiędzy warstwami za pomocą robota przemysłowego firmy Yaskawa oraz chwytaka mechanicznego wyprodukowanego w firmie Pneumatic Complex.
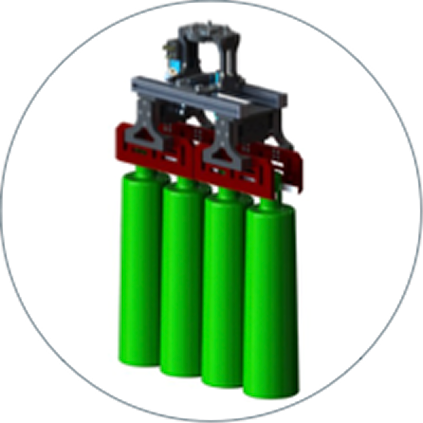
Proces paletyzacji produktów w postaci worków z materiałem sypkim za pomocą robota przemysłowego firmy Yaskawa oraz chwytaka próżniowego typu Kenos firmy Piab.
Proces produkcyjny kompletnego wyrobu za pomocą robota przemysłowego firmy Yaskawa oraz chwytaków mechanicznych, przy zastosowaniu 4 podprocesów: pobierania podzespołów, pozycjonowania podzespołów oraz klejenia taśmą dwustronną.
Proces depaletyzacji produktów wraz ze zdejmowaniem przekładek pomiędzy warstwami zapomocą robota przemysłowego firmy Yaskawa oraz chwytaka próżniowego typu Kenos firmy Piab.
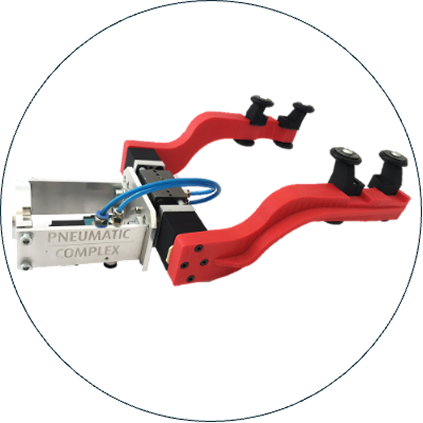
Proces produkcyjny kompletnego wyrobu za pomocą robota przemysłowego firmy Yaskawa oraz chwytaka pneumatycznego firmy PHD Inc.
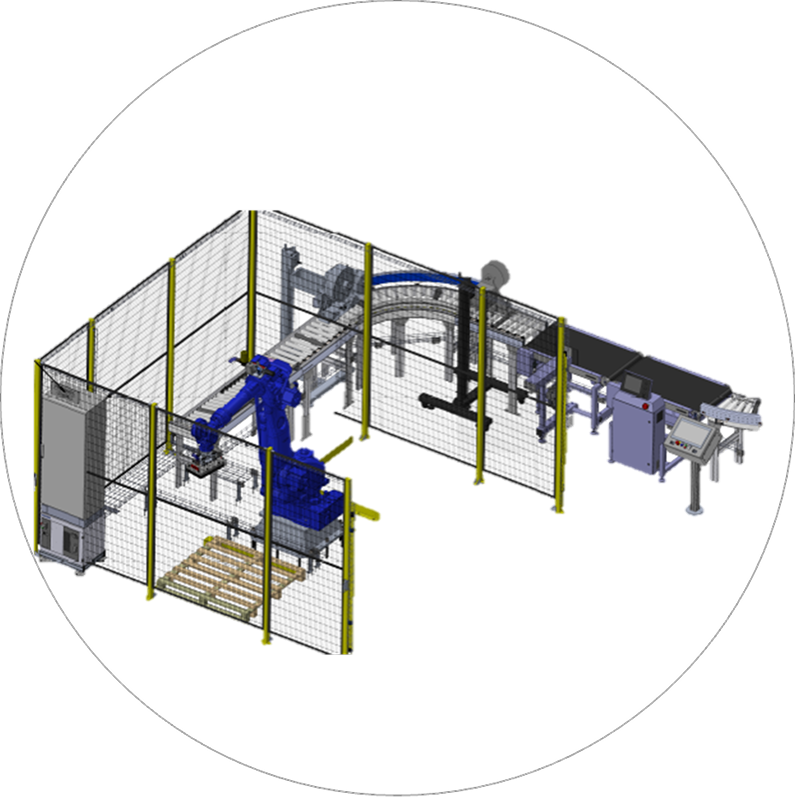
Proces depaletyzacji produktów za pomocą robota przemysłowego firmy Yaskawa, chwytaka próżniowego typu Kenos firmy Piab oraz automatycznym podawaniem palet (Paletomat).
Proces klejenia typu Hot Melt produktów za pomocą robota przemysłowego firmy Yaskawa oraz głowicy klejowej firmy Pneumatic Complex.
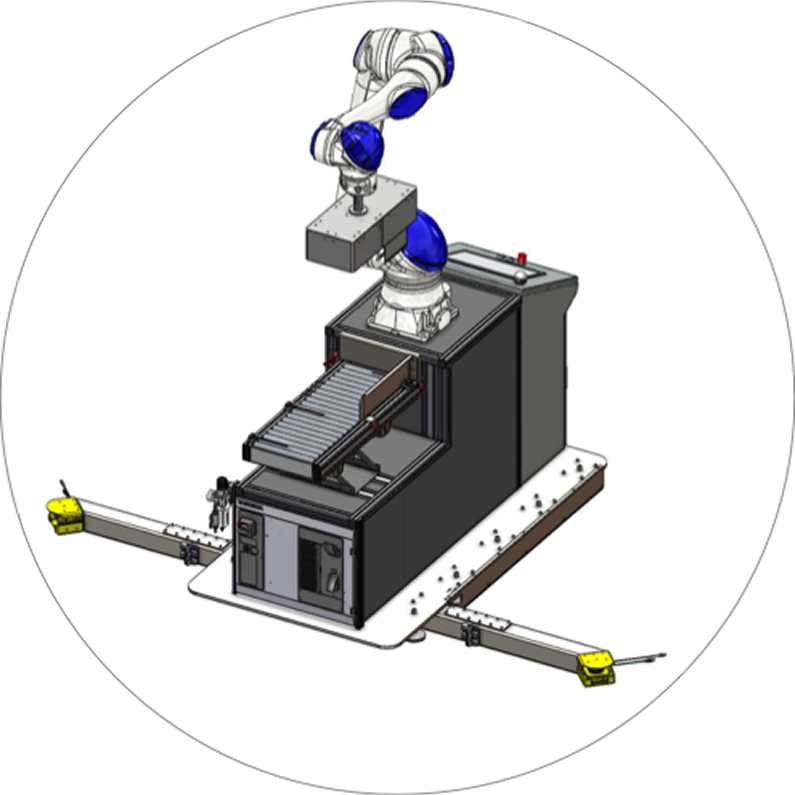
STANOWISKA ZROBOTYZOWANE MOBILNE
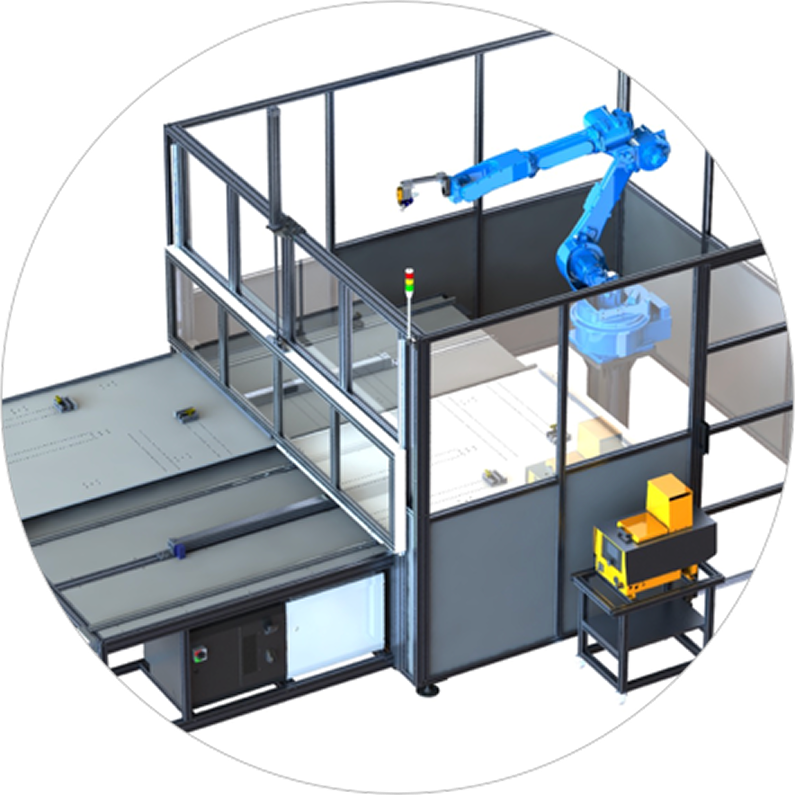
Proces wykorzystania Stanowiska Zrobotyzowanego z robotem przemysłowym firmy Yaskawa oraz chwytakami mechanicznymi firmy PHD Inc do obsługi maszyn skrawających typy CNC.
Proces dostarczania półproduktów do Stanowiska Zrobotyzowanego za pomocą podajników grawitacyjnych.
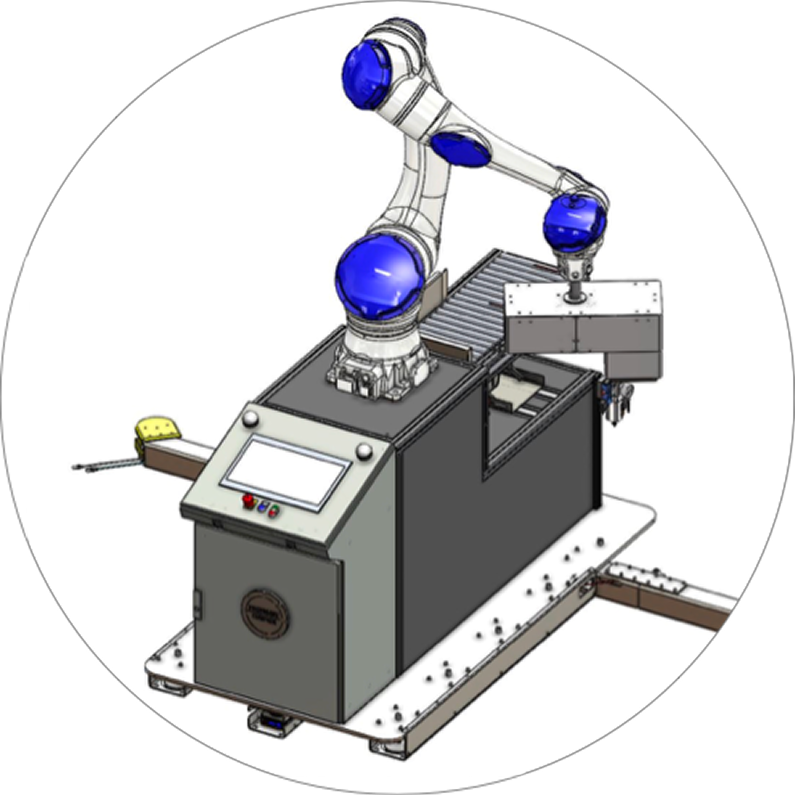
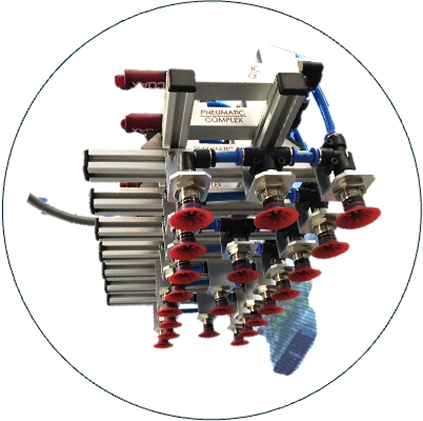
Wykorzystanie mobilnego Stanowiska Zrobotyzowanego z cobotem firmy Yaskawa oraz chwytakami mechanicznymi firmy Pneumatic Complex do obsługi procesu paletyzacji – widok od strony transportera.
Wykorzystanie mobilnego Stanowiska Zrobotyzowanego z cobotem firmy Yaskawa oraz chwytakami mechanicznymi firmy Pneumatic Complex do obsługi procesu paletyzacji – widok od strony panela sterującego.
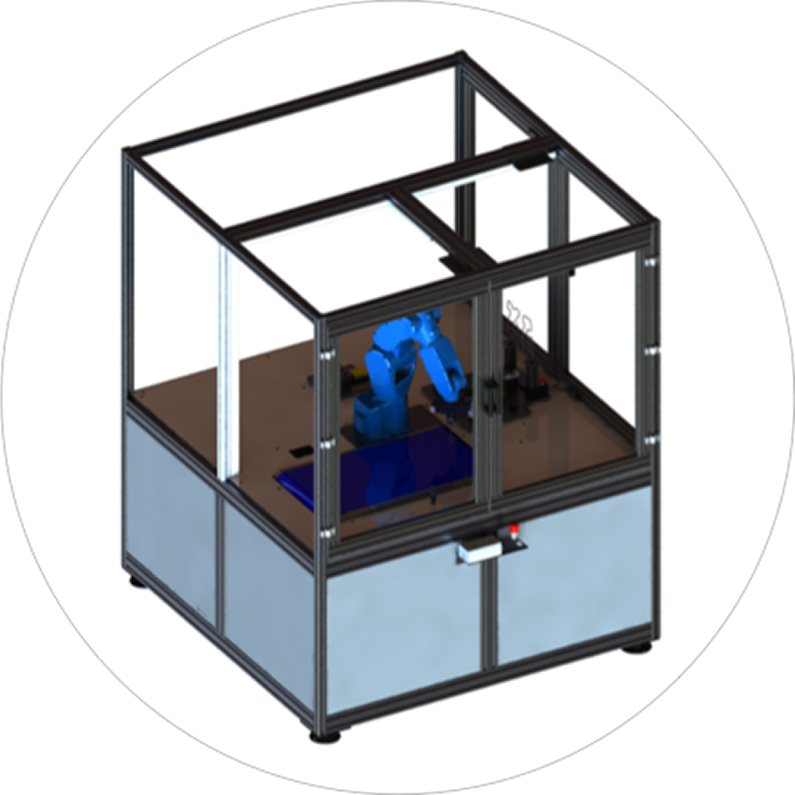
ZROBOTYZOWANE STANOWISKO EDUKACYJNE
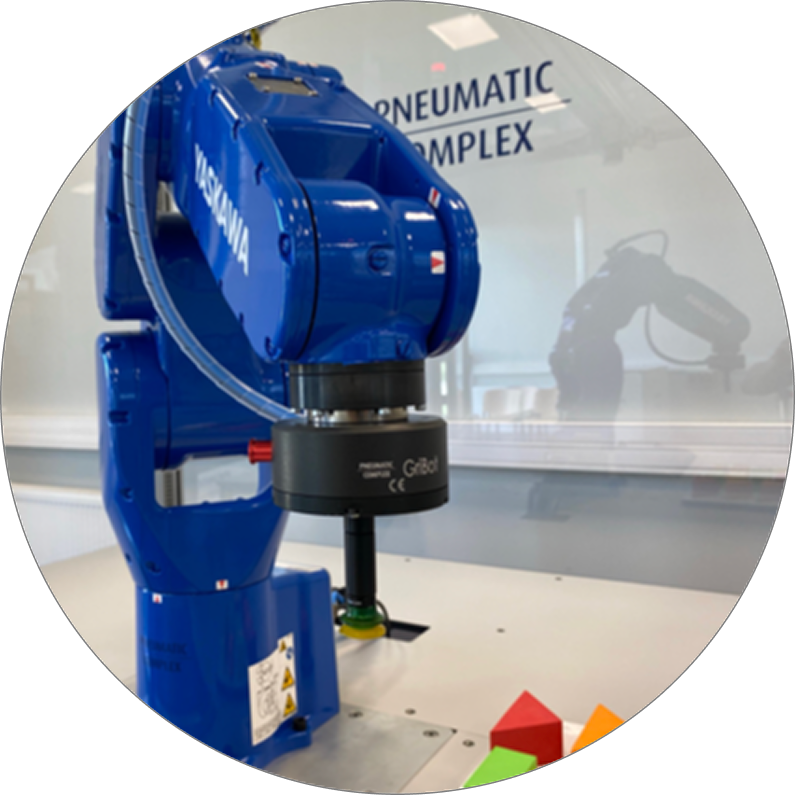
Stanowisko edukacyjne dla uczniów szkół średnich do nauki programowania robota przemysłowego firmy Yaskawa oraz chwytaka pneumatycznego firmy Pneumatic Complex lb PHD Inc.
Stanowisko edukacyjne dla uczniów szkół średnich do nauki programowania robota przemysłowego firmy Yaskawa, chwytaka pneumatycznego firmy Pneumatic Complex w realizacji ruch typu Pick and Place.
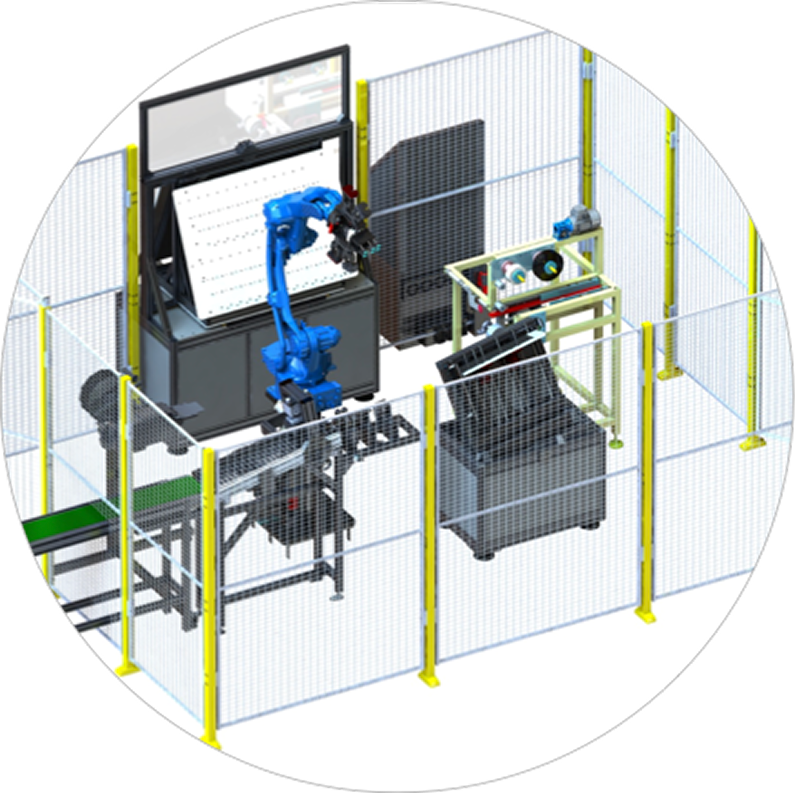
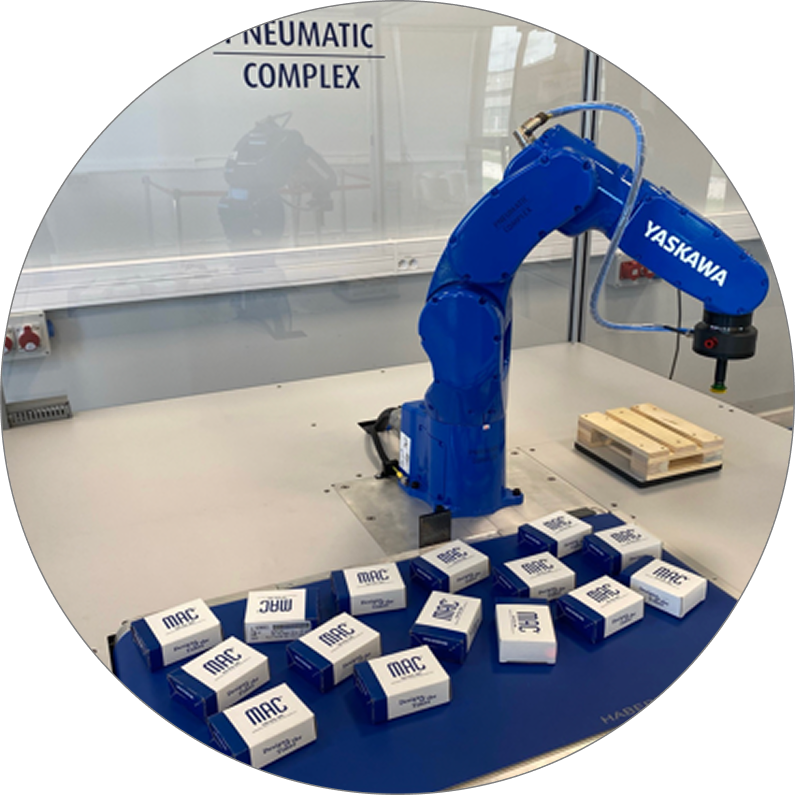
Stanowisko edukacyjne dla uczniów szkół średnich do nauki programowania robota przemysłowego firmy Yaskawa oraz chwytaka pneumatycznego firmy Pneumatic Complex z zastosowaniem systemu wizyjnego do rozpoznawania położenia pudełek MAC.
Stanowisko edukacyjne dla uczniów szkół średnich do nauki programowania robota przemysłowego firmy Yaskawa, chwytaka pneumatycznego firmy PHD Inc w realizacji precyzyjnego ruchu robota z wykorzystaniem zabawy „Mały Elektryk”.