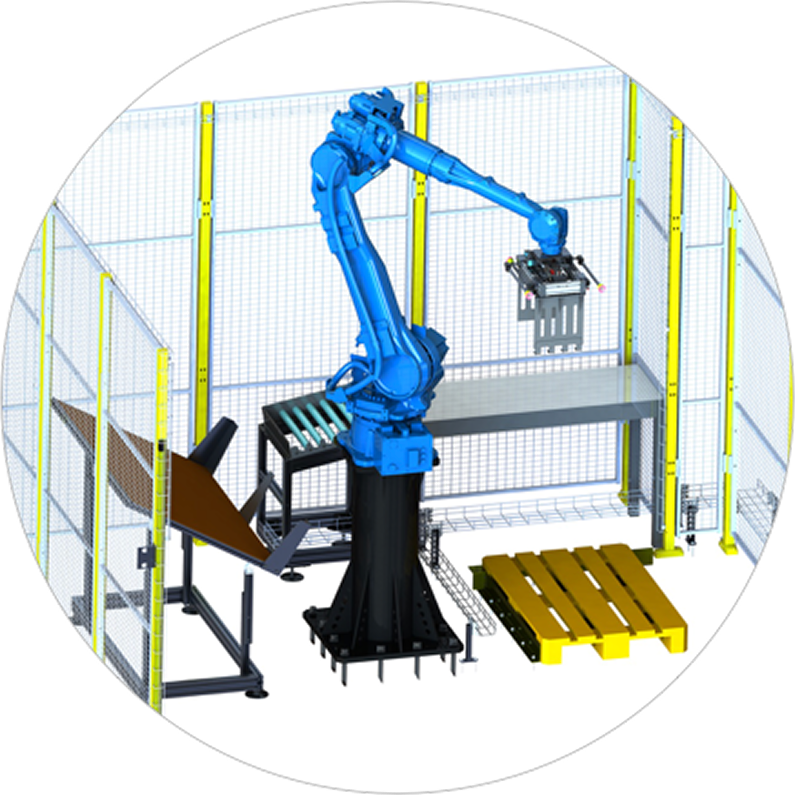
Proces paletyzacji produktów wraz z umieszczeniem przekładek pomiędzy warstwami za pomocą robota przemysłowego firmy Yaskawa oraz chwytaka mechanicznego wyprodukowanego w firmie Pneumatic Complex
Przykład 2
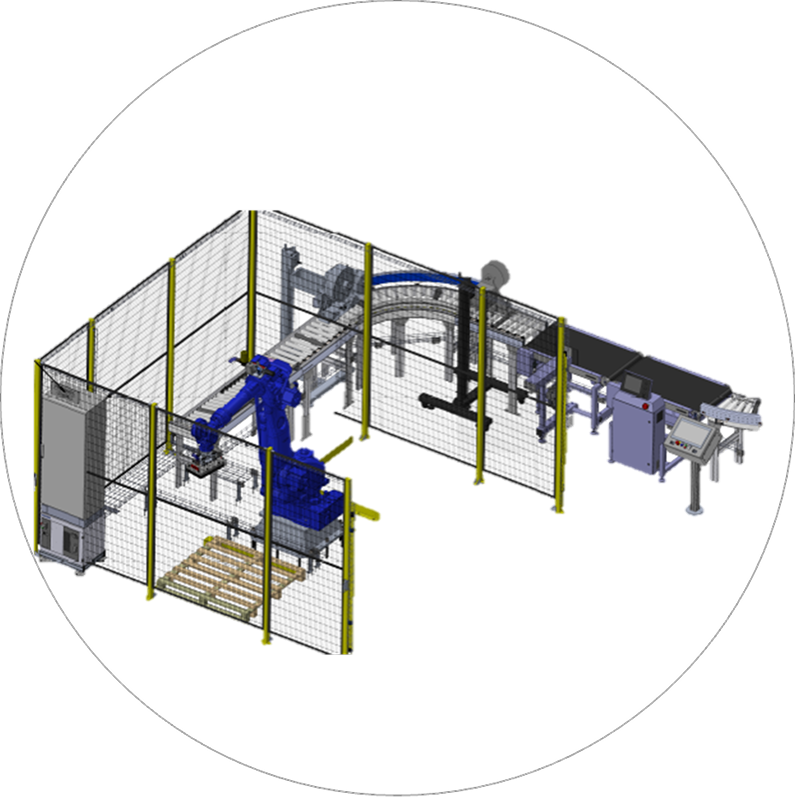
Proces paletyzacji produktów w postaci worków z materiałem sypkim za pomocą robota przemysłowego firmy Yaskawa oraz chwytaka próżniowego typu Kenos firmy Piab.
Przykład 3
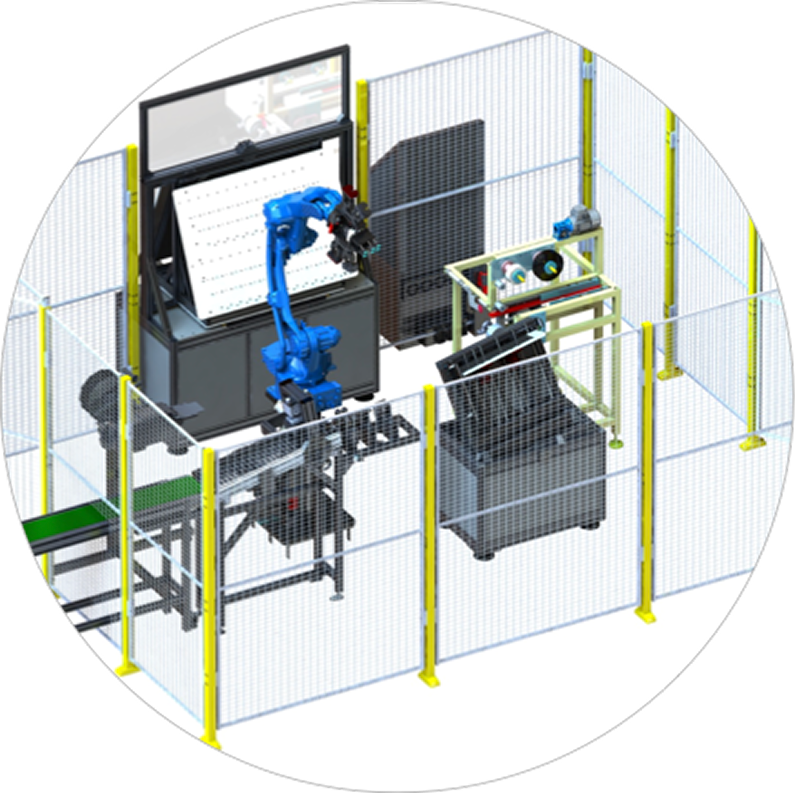
Proces produkcyjny kompletnego wyrobu za pomocą robota przemysłowego firmy Yaskawa oraz chwytaków mechanicznych, przy zastosowaniu 4 podprocesów: pobierania podzespołów, pozycjonowania podzespołów oraz klejenia taśmą dwustronną.
Przykład 4
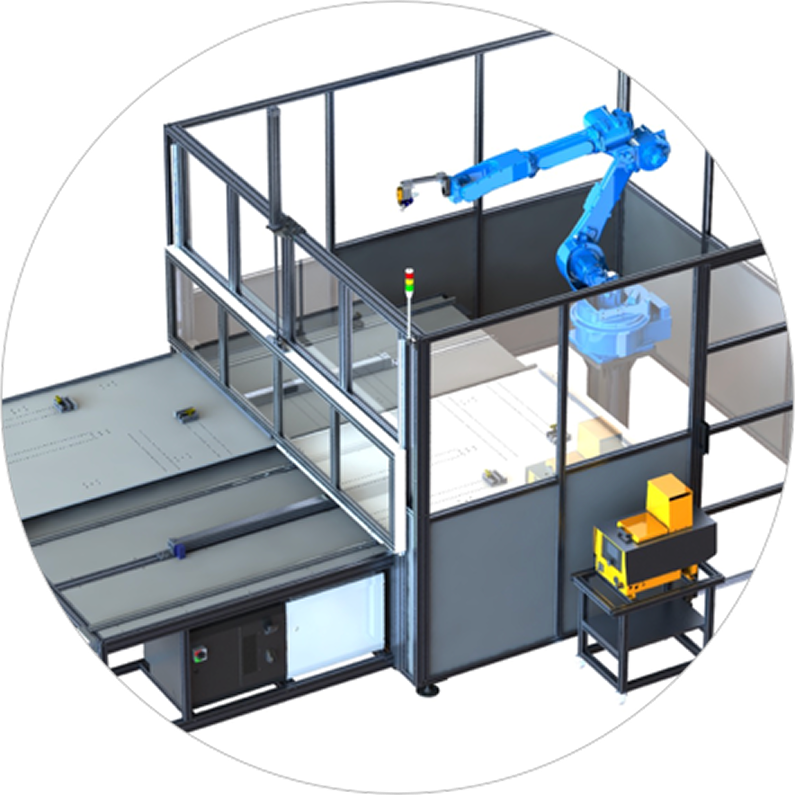
Proces depaletyzacji produktów wraz ze zdejmowaniem przekładek pomiędzy warstwami zapomocą robota przemysłowego firmy Yaskawa oraz chwytaka próżniowego typu Kenos firmy Piab.
Przykład 5
Proces produkcyjny kompletnego wyrobu za pomocą robota przemysłowego firmy Yaskawa oraz chwytaka pneumatycznego firmy PHD Inc
Przykład 6
Proces depaletyzacji produktów za pomocą robota przemysłowego firmy Yaskawa, chwytaka próżniowego typu Kenos firmy Piab oraz automatycznym podawaniem palet (Paletomat)
Przykład 7
Proces klejenia typu Hot Melt produktów za pomocą robota przemysłowego firmy Yaskawa oraz głowicy klejowej firmy Pneumatic Complex.